高等教育領域數字化綜合服務平臺






上海交通大學
教育部
- 66 高校采購信息
- 215 科技成果項目
- 2 創新創業項目
- 0 高校項目需求
慣性導航系統運動對準技術
2021-04-13 00:00:00
云上高博會
http://www.c05ze3x.xyz
關鍵詞:
運動對準技術


所屬領域:
項目成果/簡介:
本技術涉及一種慣性導航系統的運動對準方法,即如何在運動情況下借助GNSS信息提供慣性導航系統的初始姿態。在艦載機、制導彈藥、水下無人潛航器和地面機動車輛等應用中,要求INS能夠在運動過程中進行對準。目前運動對準的主流方法借鑒了靜態或準靜態情況下的實現思路,即通常包括粗對準和精對準兩個階段。粗對準用于得到粗略的初始姿態,為精對準提供初始值。精對準通常采用基于泰勒級數展開的非線性濾波方法,如一階線性近似的擴展卡爾曼濾波EKF等。采用EKF等非線性濾波方法進行精對準,需要知道較準確的慣性器件,例如陀螺和加速度計,以及外部速度/位置信息的噪聲特性,而且要求粗對準提供的初始姿態誤差不能過大,否則濾波器將不能在規定的時間內收斂到理想的精對準結果,有時甚至發散。
在本技術考慮的應用場合中,INS安裝在運動載體上,INS的速度和位置信息由GPS或其他外部信息源給出。
本技術的特色和優勢:在沒有任何姿態先驗初值的情況下可實現慣性導航系統的快速姿態對準,無需知道慣性器件及外部速度/位置信息的噪聲特性,無需任何姿態初值,具有絕對的計算穩定性,不存在發散的情況,只要速度/位置輔助信息有效,能夠在任意運動情況下實現姿態對準,大幅縮短載體導航前的準備時間。
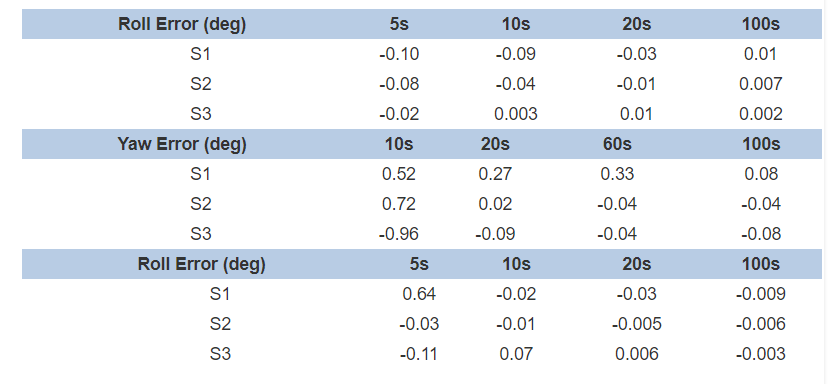
飛行試驗測試典型結果:

其中S1為上升段,S2為轉彎段,S3為下降段。數據長度均為100s。下表分別給出了三個姿態誤差角在5s,10s,20s和100s時情況:
項目階段:

掃碼關注,查看更多科技成果
取消
確定