







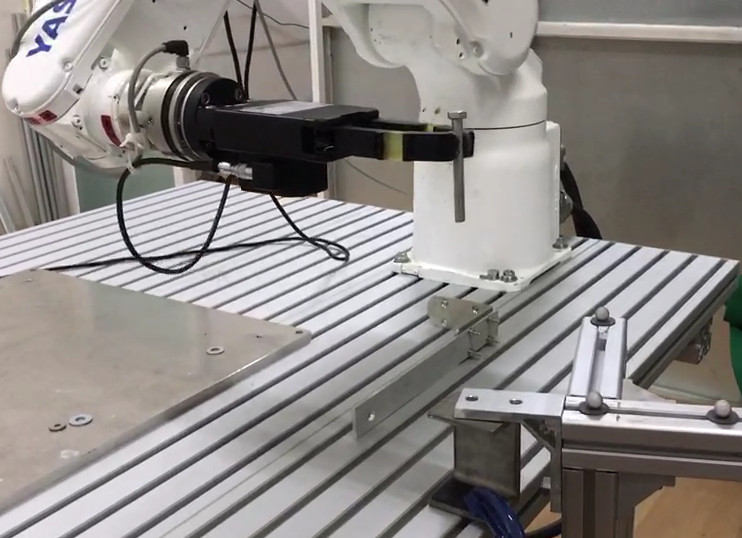

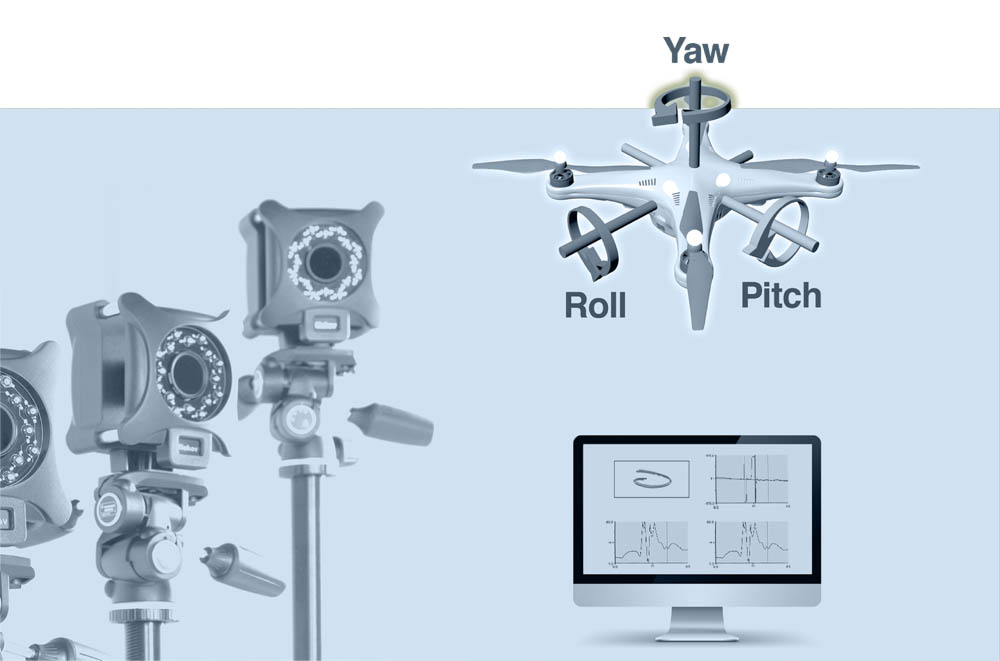
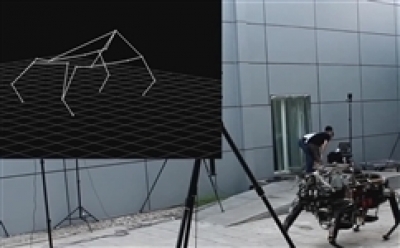





機器人無人機六自由度實時位姿采集與定位追蹤 NOKOV可實現(xiàn)高精度實時室內(nèi)定位與運動追蹤,對六自由度位姿數(shù)據(jù)與關(guān)節(jié)角度等運動學(xué)數(shù)據(jù)進行采集。 得到的數(shù)據(jù)可以通過VRPN傳輸,或通過SDK(C++語言)端口廣播與ROS、Labview、Matlab(包含Simulink) 等軟件通信進行二次開發(fā)。 室內(nèi)定位 • NOKOV(度量)光學(xué)三維動作捕捉系統(tǒng)可實時獲取機器人和無人機精準位置、姿態(tài)和六自由度(6DoF)位姿數(shù)據(jù)。 • 即使是數(shù)百平米的超大實驗室環(huán)境內(nèi),也能完成對單個/多個機器人或無人機的穩(wěn)定的位姿采集與定位追蹤,并實時輸出位置與姿態(tài)數(shù)據(jù)。 多剛體結(jié)構(gòu)定位 在機械臂、機械手、仿人機器人、仿生機器人、四足/六足機器人、外骨骼機器人、機器人化動力假肢等多剛體的研究中,NOKOV可實時 獲取多剛體結(jié)構(gòu)的關(guān)節(jié)角度與六自由度數(shù)據(jù)信息,并支持數(shù)據(jù)導(dǎo)出。 人體步態(tài)動作捕捉 NOKOV(度量)光學(xué)三維動作捕捉系統(tǒng)可采集人或其他生物的三維位置數(shù)據(jù)(三維空間坐標)、六自由度(6DoF) 的運動軌跡和關(guān)節(jié)角度、旋轉(zhuǎn)、足跟坐標等運動學(xué)數(shù)據(jù)。基于整套系統(tǒng)超高的實時性,NOKOV可支持數(shù)據(jù)的實時可視化, 并可導(dǎo)出至第三方軟件進行進一步的數(shù)據(jù)處理。 常見關(guān)節(jié)角度:頭和軀干、上肢(肩、肘、腕、手)、下肢(髖、膝、踝、足)。
|
北京度量科技有限公司
 搜 索
搜 索
